版本
QEMU版本:4.1.0 KVM/Linux kernel版本:4.20.17
QEMU/KVM初始化过程,QEMU部分
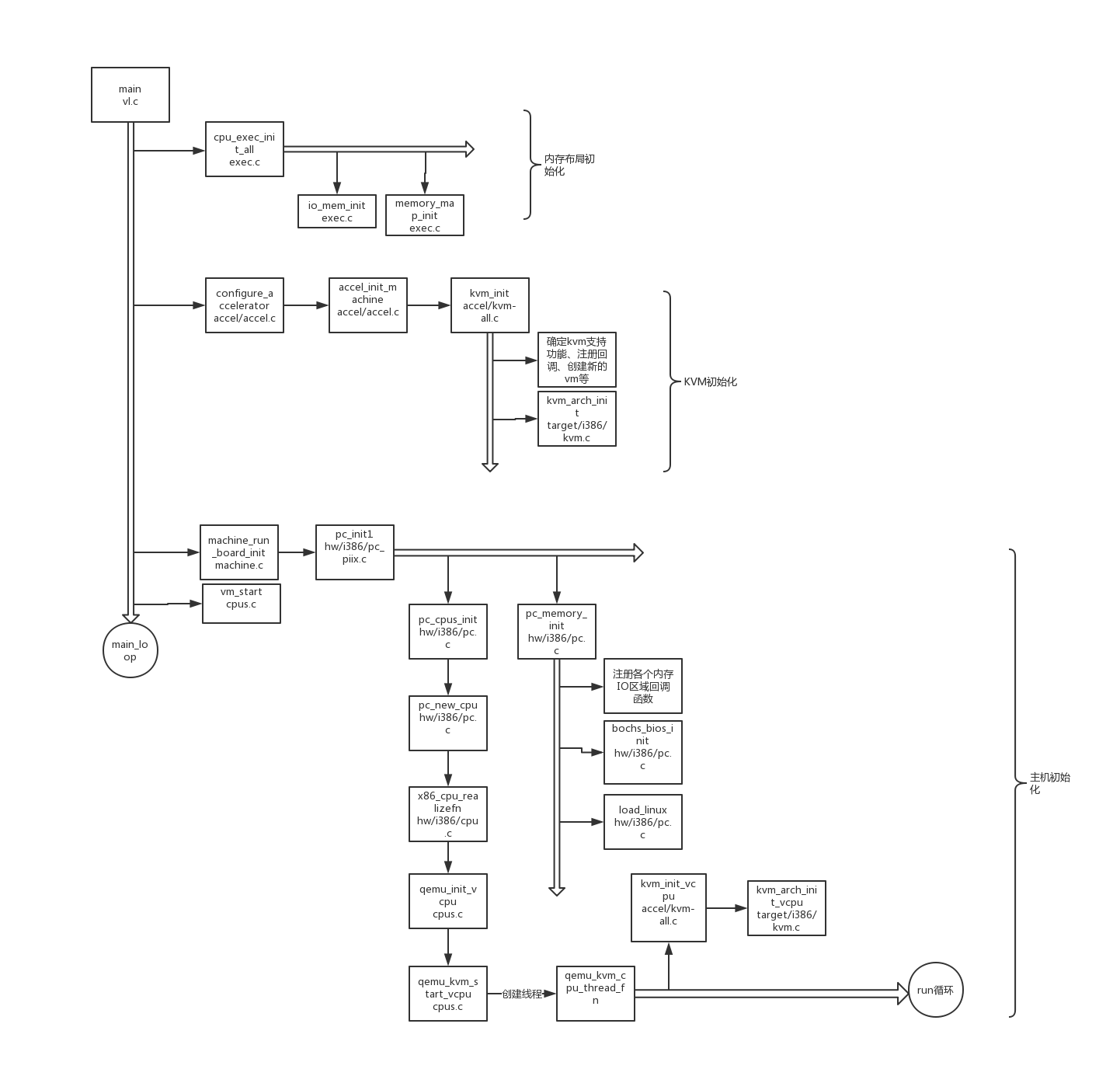 vl.c文件是QEMU的main函数所在的文件,main函数是qemu的入口,在函数的开始会有一个大循环负责解析命令行参数。之后QEMU的初始化主要分三个阶段,中间会穿插一些设备的初始化。
vl.c文件是QEMU的main函数所在的文件,main函数是qemu的入口,在函数的开始会有一个大循环负责解析命令行参数。之后QEMU的初始化主要分三个阶段,中间会穿插一些设备的初始化。
内存布局的初始化
内存布局初始化函数为cpu_exec_init_all(),该函数在早起版本QEMU中也负责讲bootloader和内核等加载入内存,在现在的版本中,该函数只负责初始化客户机物理内存布局和IO布局和注册操作函数。
void cpu_exec_init_all(void)
{
qemu_mutex_init(&ram_list.mutex);
/* The data structures we set up here depend on knowing the page size,
* so no more changes can be made after this point.
* In an ideal world, nothing we did before we had finished the
* machine setup would care about the target page size, and we could
* do this much later, rather than requiring board models to state
* up front what their requirements are.
*/
finalize_target_page_bits();
io_mem_init();
memory_map_init();
qemu_mutex_init(&map_client_list_lock);
}
KVM初始化
configure_accelerator()负责初始化kvm。这个函数会根据配置文件或者命令行参数初始化对应的acce,包括tcg、kvm、xen。该函数调用accel_init_machine(),这个函数又调用对应类的init_machine方法。
for (tmp = accel_list; !accel_initialised && tmp && *tmp; tmp++) {
acc = accel_find(*tmp);
if (!acc) {
continue;
}
ret = accel_init_machine(acc, ms);
if (ret < 0) {
init_failed = true;
error_report("failed to initialize %s: %s",
acc->name, strerror(-ret));
} else {
accel_initialised = true;
}
}
static int accel_init_machine(AccelClass *acc, MachineState *ms)
{
ObjectClass *oc = OBJECT_CLASS(acc);
const char *cname = object_class_get_name(oc);
AccelState *accel = ACCEL(object_new(cname));
int ret;
ms->accelerator = accel;
*(acc->allowed) = true;
ret = acc->init_machine(ms);
if (ret < 0) {
ms->accelerator = NULL;
*(acc->allowed) = false;
object_unref(OBJECT(accel));
} else {
object_set_accelerator_compat_props(acc->compat_props);
}
return ret;
}
在kvm部分中,init_machine方法是kvm-all.c中的kvm_init()函数,这个函数很长,他的主要功能是使用ioctl通知kvm创建一个新的vm,确定kvm所支持的功能符合qemu所需要的功能需求,注册内存和IO事件通知回调函数。
s->vmfd = -1;
s->fd = qemu_open("/dev/kvm", O_RDWR);
if (s->fd == -1) {
fprintf(stderr, "Could not access KVM kernel module: %m\n");
ret = -errno;
goto err;
}
ret = kvm_ioctl(s, KVM_GET_API_VERSION, 0);
if (ret < KVM_API_VERSION) {
if (ret >= 0) {
ret = -EINVAL;
}
fprintf(stderr, "kvm version too old\n");
goto err;
}
if (ret > KVM_API_VERSION) {
ret = -EINVAL;
fprintf(stderr, "kvm version not supported\n");
goto err;
}
kvm_immediate_exit = kvm_check_extension(s, KVM_CAP_IMMEDIATE_EXIT);
s->nr_slots = kvm_check_extension(s, KVM_CAP_NR_MEMSLOTS);
....
do {
ret = kvm_ioctl(s, KVM_CREATE_VM, type);
} while (ret == -EINTR);
这个函数最后会调用kvm_arch_init()去进行一些架构特有的初始化,这个函数在x86中是target/i386/kvm.c中的kvm_arch_init()。在x86中这个函数主要是设置EPT支持等x86虚拟化架构特有的功能。
主机初始化
这部分是工作最多,最复杂的初始化部分。这部分的功能主要包括创建并初始化vCPU、加载bootloader、kernel等到虚拟机物理内存,初始化总线等。这部分代码入口函数是machine_run_board_init(),这个函数的调用是main函数初始化部分最后的几个,之初始化就完成了。
void machine_run_board_init(MachineState *machine)
{
MachineClass *machine_class = MACHINE_GET_CLASS(machine);
numa_complete_configuration(machine);
if (nb_numa_nodes) {
machine_numa_finish_cpu_init(machine);
}
/* If the machine supports the valid_cpu_types check and the user
* specified a CPU with -cpu check here that the user CPU is supported.
*/
if (machine_class->valid_cpu_types && machine->cpu_type) {
ObjectClass *class = object_class_by_name(machine->cpu_type);
int i;
for (i = 0; machine_class->valid_cpu_types[i]; i++) {
if (object_class_dynamic_cast(class,
machine_class->valid_cpu_types[i])) {
/* The user specificed CPU is in the valid field, we are
* good to go.
*/
break;
}
}
if (!machine_class->valid_cpu_types[i]) {
/* The user specified CPU is not valid */
error_report("Invalid CPU type: %s", machine->cpu_type);
error_printf("The valid types are: %s",
machine_class->valid_cpu_types[0]);
for (i = 1; machine_class->valid_cpu_types[i]; i++) {
error_printf(", %s", machine_class->valid_cpu_types[i]);
}
error_printf("\n");
exit(1);
}
}
machine_class->init(machine);
}
这个函数最终会调用machine_class的init方法。这个方法在x86上的实现是hw/i386/pc_piix.c中的pc_init1()。这个函数非常长与复杂,这里我们关心两部分内容。
vCPU初始化
pc_cpus_init(pcms);
if (kvm_enabled() && pcmc->kvmclock_enabled) {
kvmclock_create();
}
调用pc_cpus_init()进行vcpu的创建和初始化。这个函数会调用pc_new_cpu()创建规定数量的vCPU。pc_new_cpu()最终将调用x86_cpu_realizefn(),这个函数又会调用qemu_init_vcpu()。qemu_init_vcpu()中会创建一个线程,线程函数为qemu_kvm_cpu_thread_fn(),这将是之后gust实际执行的时候的函数。qemu_kvm_cpu_thread_fn()开始会调用kvm_init_vcpu(),这个函数会使用ioctl通知kvm创建新vcpu。kvm_init_vcpu()又会调用kvm_arch_init_vcpu()对vCPU进行架构特定的初始化。
镜像加载
pc_memory_init()在非xen的情况下将被调用,这个函数将具体的初始化内存和IO的各个区域并调用bochs_bios_init和load_linux加载内核。
运行
QEMU
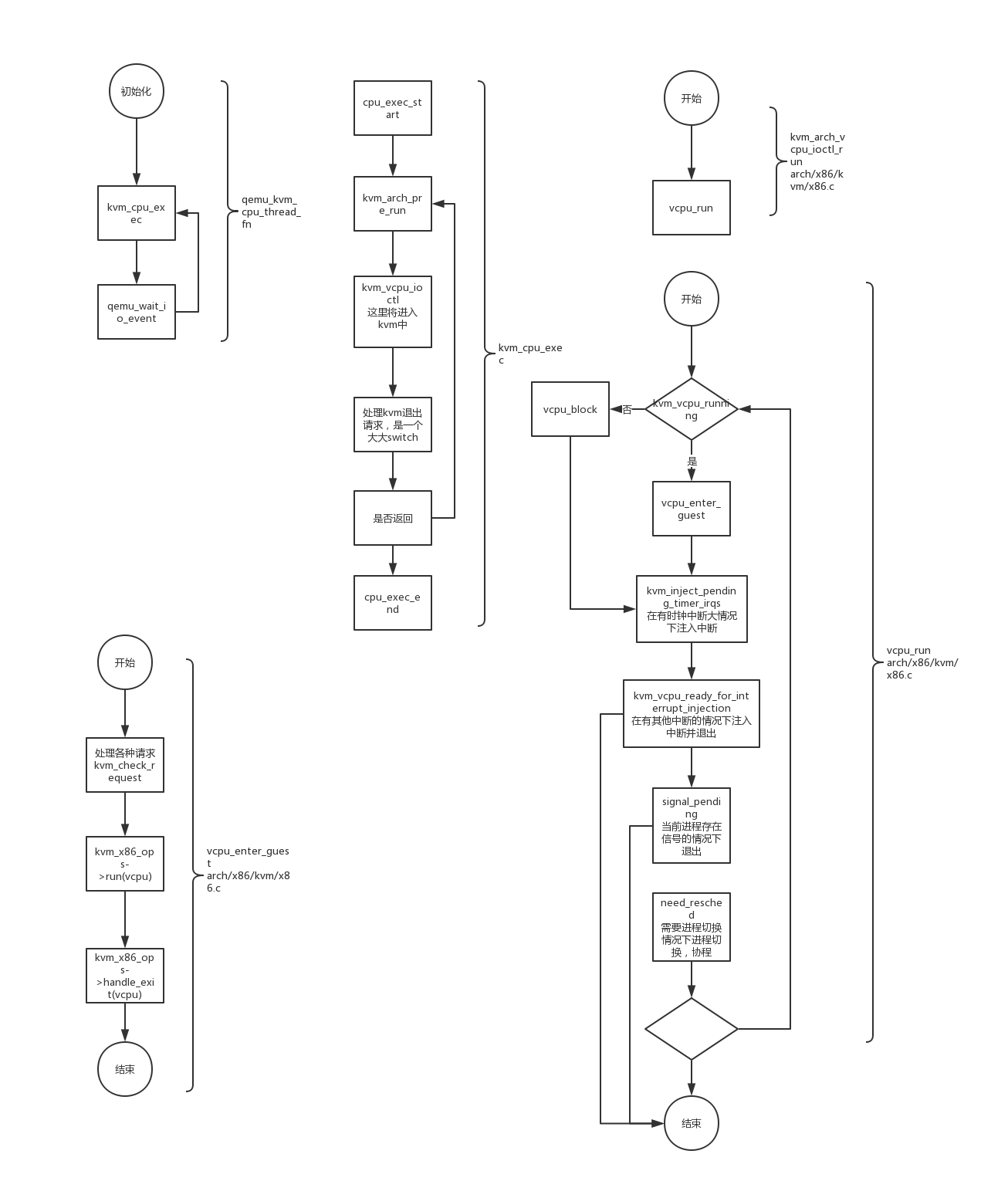
之前创建的线程中有一个大循环,执行kvm_cpu_exec()
do {
if (cpu_can_run(cpu)) {
r = kvm_cpu_exec(cpu);
if (r == EXCP_DEBUG) {
cpu_handle_guest_debug(cpu);
}
}
qemu_wait_io_event(cpu);
} while (!cpu->unplug || cpu_can_run(cpu));
kvm_cpu_exec()函数会调用ioctl让kvm执行客户机代码,一直到在需要进行IO模拟等操作。此时从内核返回,由qemu处理这些操作,之后返回kvm继续执行。
KVM
在qemu通过ioctl进入内核后,将进入kvm_arch_vcpu_ioctl_run函数。
vcpu_load(vcpu);
kvm_sigset_activate(vcpu);
kvm_load_guest_fpu(vcpu);
...
if (kvm_run->immediate_exit)
r = -EINTR;
else
r = vcpu_run(vcpu);
这个函数将调用vcpu_run,vcpu_run中存在一个大循环
for (;;) {
if (kvm_vcpu_running(vcpu)) {
r = vcpu_enter_guest(vcpu);
} else {
r = vcpu_block(kvm, vcpu);
}
if (r <= 0)
break;
kvm_clear_request(KVM_REQ_PENDING_TIMER, vcpu);
if (kvm_cpu_has_pending_timer(vcpu))
kvm_inject_pending_timer_irqs(vcpu);
if (dm_request_for_irq_injection(vcpu) &&
kvm_vcpu_ready_for_interrupt_injection(vcpu)) {
r = 0;
vcpu->run->exit_reason = KVM_EXIT_IRQ_WINDOW_OPEN;
++vcpu->stat.request_irq_exits;
break;
}
kvm_check_async_pf_completion(vcpu);
if (signal_pending(current)) {
r = -EINTR;
vcpu->run->exit_reason = KVM_EXIT_INTR;
++vcpu->stat.signal_exits;
break;
}
if (need_resched()) {
srcu_read_unlock(&kvm->srcu, vcpu->srcu_idx);
cond_resched();
vcpu->srcu_idx = srcu_read_lock(&kvm->srcu);
}
}
在大循环中,将调用vcpu_enter_guest。vcpu_enter_guest代码也很长,会调用kvm_x86ops->run,为开始客户机执行做准备,这个方法的实现是vmx_vcpu_run,最终将调用___vmx_vcpu_run,该函数实际上是一个汇编写的trampoline。而在vcpu_enter_guest退出时,将调用kvm_x86_ops->handle_exit(vcpu)处理。
static int (*kvm_vmx_exit_handlers[])(struct kvm_vcpu *vcpu) = {
[EXIT_REASON_EXCEPTION_NMI] = handle_exception,
[EXIT_REASON_EXTERNAL_INTERRUPT] = handle_external_interrupt,
[EXIT_REASON_TRIPLE_FAULT] = handle_triple_fault,
[EXIT_REASON_NMI_WINDOW] = handle_nmi_window,
[EXIT_REASON_IO_INSTRUCTION] = handle_io,
[EXIT_REASON_CR_ACCESS] = handle_cr,
[EXIT_REASON_DR_ACCESS] = handle_dr,
[EXIT_REASON_CPUID] = handle_cpuid,
[EXIT_REASON_MSR_READ] = handle_rdmsr,
[EXIT_REASON_MSR_WRITE] = handle_wrmsr,
[EXIT_REASON_PENDING_INTERRUPT] = handle_interrupt_window,
[EXIT_REASON_HLT] = handle_halt,
[EXIT_REASON_INVD] = handle_invd,
[EXIT_REASON_INVLPG] = handle_invlpg,
[EXIT_REASON_VMCALL] = handle_vmcall,
[EXIT_REASON_VMCLEAR] = handle_vmx_insn,
[EXIT_REASON_VMLAUNCH] = handle_vmx_insn,
[EXIT_REASON_VMPTRLD] = handle_vmx_insn,
[EXIT_REASON_VMPTRST] = handle_vmx_insn,
[EXIT_REASON_VMREAD] = handle_vmx_insn,
[EXIT_REASON_VMRESUME] = handle_vmx_insn,
[EXIT_REASON_VMWRITE] = handle_vmx_insn,
[EXIT_REASON_VMOFF] = handle_vmx_insn,
[EXIT_REASON_VMON] = handle_vmx_insn,
[EXIT_REASON_TPR_BELOW_THRESHOLD] = handle_tpr_below_threshold,
[EXIT_REASON_APIC_ACCESS] = handle_apic_access,
[EXIT_REASON_WBINVD] = handle_wbinvd,
[EXIT_REASON_XSETBV] = handle_xsetbv,
[EXIT_REASON_TASK_SWITCH] = handle_task_switch,
[EXIT_REASON_MCE_DURING_VMENTRY] = handle_machine_check,
[EXIT_REASON_EPT_VIOLATION] = handle_ept_violation,
[EXIT_REASON_EPT_MISCONFIG] = handle_ept_misconfig,
[EXIT_REASON_PAUSE_INSTRUCTION] = handle_pause,
[EXIT_REASON_MWAIT_INSTRUCTION] = handle_invalid_op,
[EXIT_REASON_MONITOR_INSTRUCTION] = handle_invalid_op,
};
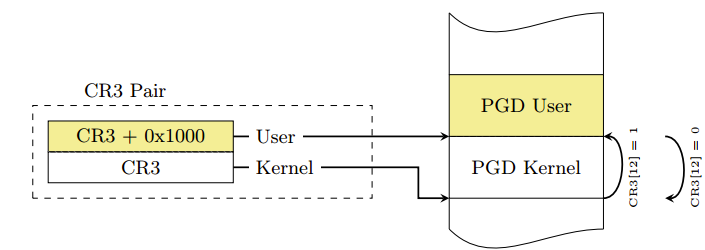 这样一来一个进程实际上有两个CR3,一个是跑在内核态时,值即使进程的mm_struct.pgd,另一个跑在用户态时,值为之前的值加0x1000.
这样一来一个进程实际上有两个CR3,一个是跑在内核态时,值即使进程的mm_struct.pgd,另一个跑在用户态时,值为之前的值加0x1000.